Denomina-se torque
ou momentoMo de uma força
em relação a um ponto O (polo), o produto da intensidade
da força pela distância d do polo
à linha de ação da força (braço):
Mo= ± F · b.
(1)
No Sistema Internacional de Unidades (SI), a unidade do torque ou
momento é o newton X metro (N · m).
O sinal
± é utilizado para indicar o sentido de
rotação devido ao torque, sendo considerado (+)
para a rotação no sentido anti-horário e (-)
para a rotação no sentido horário.
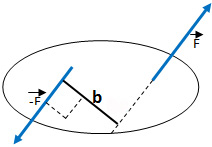
Exemplo: observe, na figura, para o mesmo torque,
ao maior braço corresponde a menor força e ao menor
braço, a maior força.
Figura 1
1. Vamos determinar o momento da força F1
em relação ao ponto O, supondo F1 = 100
N e o seu braço b1 = 12 cm.
Mo = - F1· b1
= - 100 · 0,12 = - 12 N·m
2. Supondo Mo = F2· b2 =
12 N·m, determinar b2 se F2 = 80 N.
12 = 80· b2, portanto b2 = 0,15 m
3. Determinar a intensidade da força F3, supondo
Mo = - F3· b3 = - 12 N·m
e b3 = 20 cm.
- 12 = - F3· b3 = -F3·
0,20, portanto F3 = 60 N
2. BINÁRIO OU CONJUGADO
O conjunto de duas forças de mesma intensidade, mesma direção
e sentidos opostos denomina-se binário.
M = ± F · b
O braço b do binário é a
distância entre as duas direções das forças
que constituem o binário. Assim, o momento de um binário
será:
O sinal ± é utilizado para indicar
o sentido de rotação devido ao torque, sendo considerado
(+) para a rotação no sentido anti-horário
e (-) para a rotação no sentido horário.
Veja o exemplo na figura a seguir, que ilustra um binário
cujo momento correspondente é M = + F · b
Sendo as forças que constituem o binário,e
-resulta
a força resultante igual a zero, isto é, não
haverá movimento de translação, porém
o corpo adquire movimento de rotação, pois o
seu momento resultante não é nulo.
Figura 2
Exemplo de aplicação
Na figura acima, suponhamos a intensidade da força F = 80
N e b = 0,30 m. Determine o momento desse binário.
Resolução:
No caso, como o momento correspondente é no sentido anti-horário,
temos: M = + F · b. Substituindo os valores numéricos,
resulta: M = + 80 · 0,30 = 24 N.m
Resposta: M = 24 N.m
3. CONDIÇÃO NECESSÁRIA
E SUFICIENTE PARA O EQUILÍBRIO DO CORPO EXTENSO
Para que um corpo extenso esteja em equilíbrio estático,
é necessário que não haja translação
e nem a rotação do mesmo, isto é, a condição
necessária e suficiente será:
Um sólido, em forma de uma barra, que pode girar em torno
de um ponto fixo, constitui uma alavanca, onde três são
os elementos importantes: (nas figuras 3, 4 e 5 a seguir)
P = Potência = FP = força potente; R =Resistência
= FR = força resistente e A = Apoio = fulcro =
ponto em relação ao qual a alavanca pode sofrer rotação.
VANTAGEM
MECÂNICA(VM) é a razão
entre a força resistente FR e a força potente
FP.
As alavancas podem ser classificadas em três
tipos, cujas denominações decorrem do elemento que
fica entre os dois outros elementos. Assim, temos as alavancas interfixas,
inter-resistentes e interpotentes (veja as figuras a seguir).
Figura 3 (INTERFIXA)
Figura 4 (INTER -RESISTENTE)
Figura 5 (INTERFIXA)
Exemplo de aplicação
Na figura 4, suponhamos o sistema em equilíbrio estático
com a carga de peso FR = 180 N, com os braços das forças
br= 1,0 m e bp = 3,0 m. Determinar as intensidades das forças
FP e a que age na barra no fulcro FF.
Resolução:
De acordo com a condição de equilíbrio de rotação
do corpo extenso, temos: FR x br = FP x bp. Substituindo os dados,
resulta:
180 · 1,0 = FP · 3,0, portanto, FP = 60 N.
Conforme a condição de equilíbrio de translação
do corpo extenso, temos: FF + FP = FR. Substituindo os valores numéricos,
resulta:
FF + 60 = 180, portanto, FF = 120 N.
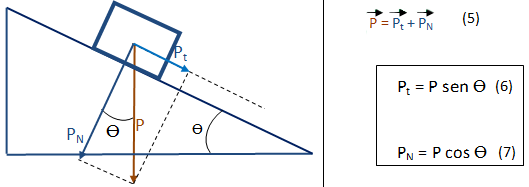
Uma superfície plana inclinada em relação à
horizontal constitui um plano inclinado.
As componentes de P são tais que:
Exemplo de aplicação
Na figura abaixo, uma barra homogênea de peso PB está
articulada a uma parede e encontra-se em equilíbrio estático.
Supondo o peso do corpo P = 120 N e q
= 37°, determinar o peso PB da barra supondo os fios e a polia
ideais, o atrito desprezível , sen 37° = 0,60 e cos 37°
= 0,80.
Figura 7
Resolução:
Estando o sistema em equilíbrio, temos: T = Pt
= P · sen 37° = 120 · 0,60 = 72 N
Sendo a barra homogênea o braço bT de
T em relação ao ponto de articulação
será o dobro do braço de PB, portanto, temos: 2T =
PB. Substituindo o valor de T obtido anteriormente, resulta: 2·72
= PB e teremos PB = 144 N
Uma roldana ou polia
é um disco com eixo no seu centro, em torno do qual o mesmo
pode girar; a polia ou roldana possui um sulco, que permite que
uma corda ou um cabo flexível possa contorná-la sem
se soltar. Veja as figuras a seguir.
Figura 8
Figura 9
Figura 10
POLIAS FIXAS são aquelas que permanecem
sempre na mesma posição, apenas giram em torno do
seu eixo, o que está ilustrado na Figura 8.
No equilíbrio, temos: F = P . (8)
POLIAS MÓVEIS são aquelas que podem se movimentar
quando o corpo a ser içado é deslocado; são
ilustradas nas Figuras 9 e 10. Na Figura 9, temos
1 polia fixa e 1 polia móvel, e na Figura 10,
temos 1 polia fixa e 4 polias móveis. No equilíbrio,
temos:
(9) onde n é o número de polias móveis.
Esses conjuntos de polias, como nos casos das figuras
2 e 3, constituem a chamada TALHA EXPONENCIAL. Nesses casos, além
da intensidade da força F depender do número
de polias móveis, também depende dos mesmos números
o deslocamento da corda em relação ao deslocamento
da carga (observe nos flashs).
Exemplos de aplicação
1) Na figura 1, temos uma polia fixa; considerando
o peso da carga P = 80 N, a corda e a polia ideais,
determine:
A) A intensidade da força F se o sistema
encontra-se em equilíbrio;
B) Nas mesmas condições do item anterior, a intensidade
da força de tração na corda, fixada ao teto,
que sustenta o conjunto carga e a polia.
Resolução:
A) Estando o sistema em equilíbrio, teremos: F =
P , portanto F = 80 N
B) Como a tração T = F + P, substituindo os valores
conhecidos, resulta: T = 80 + 80, portanto T
= 160 N
2) Na figura II, temos uma polia fixa e outra
móvel; considerando o peso da carga P = 80 N,
a corda e a polia ideais, determine a intensidade da força
F se o sistema encontra-se em equilíbrio.
Resolução: De acordo com a condição
de equilíbrio da talha exponencial, temos:
, substituindo o valor do peso e do n que, no caso, é n =
1, pois apenas uma polia é móvel, resulta:
3) Na figura III, temos uma polia
fixa e quatro polias móveis; considerando o peso da carga
P = 80 N, a corda e a polia ideais, determine a
intensidade da força F se o sistema encontra-se em equilíbrio.
Resolução: De acordo com a condição
de equilíbrio da talha exponencial, temos:
,
substituindo o valor do peso e do n que, no caso, é n = 4,
pois quatro são as polias móveis, resulta: